
Recueillir des informations sur les planètes du système solaire à partir de missions spatiales n'est pas aussi simple qu'un téléchargement sur Internet. Les instruments scientifiques embarqués à bord des différents vaisseaux spatiaux d'exploration renvoient des données, sous la forme d'une longue chaîne de uns et de zéros au format brut, polluées par toutes sortes de biais et de bruits et qui sont pratiquement inutiles si elles ne sont pas traitées. L'étape cruciale du traitement des données est la responsabilité des chercheurs principaux (CP) des instruments. Le CP de l'instrument NOMAD à bord de l'orbiteur de gaz à l'état de traces ExoMars de l'ESA - qui orbite actuellement autour de la planète Mars et l'observe - est le groupe Atmosphères planétaires de l'IASB. Par conséquent, il incombe aux chercheurs et ingénieurs de ce groupe de s'occuper, entre autres, de l'étalonnage (pour vérifier la précision du fonctionnement de l'instrument) et de la mise en place ainsi que de la maintenance du pipeline de données (le logiciel qui convertit toutes les données brutes entrantes en informations que les scientifiques peuvent analyser).
Étalonnage de l’instrument NOMAD
NOMAD contient 3 spectromètres : l'un est appelé UVIS (pour lumière UV et visible) et peut observer les mêmes couleurs que nos yeux et plus encore. Les deux autres, SO et LNO, mesurent la lumière infrarouge, provenant soit directement du Soleil, soit de la lumière solaire réfléchie par la surface et les nuages de Mars. Les trois canaux NOMAD ont été étalonnés dans des conditions contrôlées en laboratoire avant le lancement de la mission, ainsi que par d’autres mesures d'étalonnage spéciales effectuées pendant la mission. Ces informations sont alors utilisées pour étalonner toutes les observations scientifiques, afin que les conclusions scientifiques basées sur les données reflètent la réalité aussi fidèlement que possible.
Le spectromètre UVIS
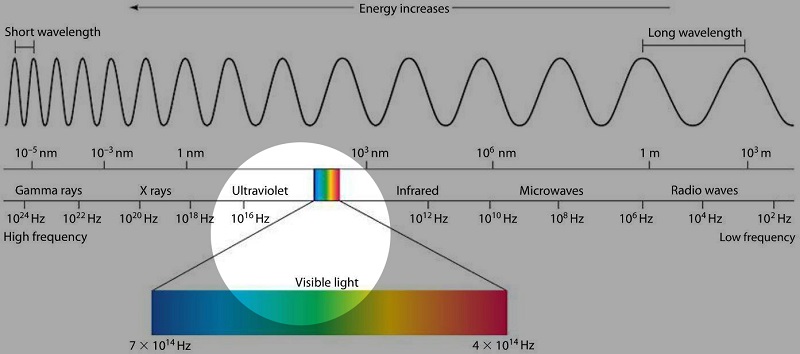
Le spectromètre UVIS mesure des longueurs d'onde comprises entre 200 et 650 nanomètres (un millionième de millimètre), réparties sur 1024 pixels différents sur un détecteur (figure 3). Cela signifie que nous pouvons mesurer les couleurs avec une grande précision pour déterminer les concentrations d'ozone, de nuages et d'aérosols (très petites particules) dans l'atmosphère de Mars. Le pipeline de données corrige le signal du détecteur, en supprimant un décalage (un petit signal qui provient de l'électronique de NOMAD) et le courant d'obscurité (le signal dû à la chaleur dans le détecteur), en éliminant les bruits indésirables et autres effets.
Crédit: BIRA-IASB
Un étalonnage spectral est également appliqué, qui attribue une longueur d'onde à chacun des 1024 pixels du détecteur, ainsi qu'une correction de la lumière parasite, qui corrige la lumière frappant les mauvais pixels du détecteur. Cette dernière partie est particulièrement importante, car elle corrige les spectres enregistrés par UVIS de manière à ce que les scientifiques puissent les interpréter correctement - une étude a donc été réalisée avec deux méthodes différentes et indépendantes. Les deux méthodes ont donné les mêmes résultats, ce qui nous a donné une confiance supplémentaire dans le fait que la méthode était correcte.
Enfin, une fois que toutes les corrections et tous les étalonnages ont été appliqués, les observations scientifiques sont converties en unités de radiance ou de transmittance qui sont comprises par les scientifiques.
Pour vérifier que le pipeline de données fonctionne correctement, les observations NOMAD sont continuellement comparées aux mesures de l'instrument MARCI à bord du vaisseau spatial MRO, qui est également en orbite autour de Mars et mesure périodiquement la même région de la planète à peu près au même moment. Les deux instruments s'accordent à 10 % près, ce qui, là encore, nous conforte dans l'idée que tout est correct.
Les spectromètres infrarouges
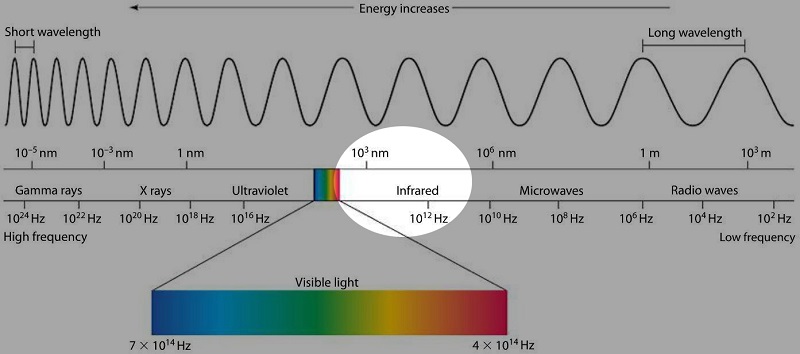
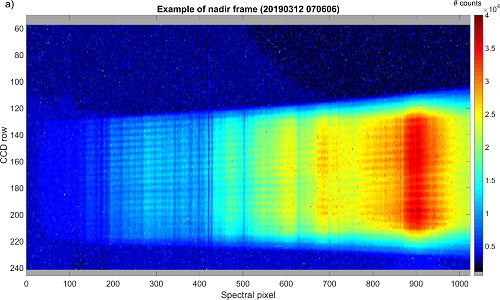
Les deux spectromètres infrarouges mesurent des longueurs d'onde comprises entre 2,2 et 4,3 micromètres (un millième de millimètre). Comme pour UVIS, de nombreuses mesures d'étalonnage ont été effectuées avant le lancement, pendant le voyage vers Mars, et continuent d'être effectuées en vol pendant la phase scientifique de la mission.
Le spectromètre SO mesure l'atmosphère martienne à l'aide d'une technique appelée "occultation solaire". Pour ce faire, SO pointe le Soleil et mesure ensuite l'absorption de l'atmosphère entre l'instrument et le Soleil au lever et au coucher du soleil. De cette manière, les gaz qui composent l'atmosphère, ainsi que les aérosols et les nuages qui bloquent la lumière, peuvent être mesurés avec une grande précision.
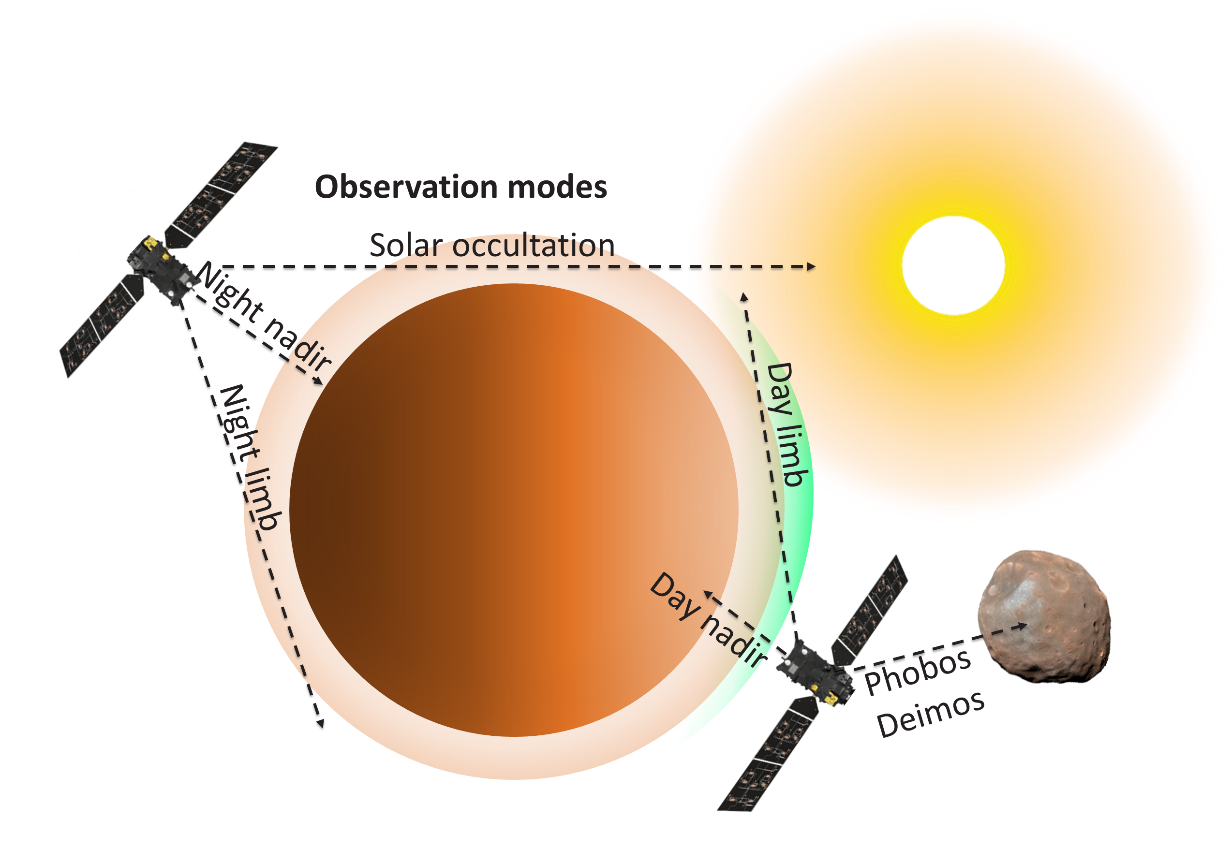
Comme UVIS, le spectromètre LNO peut fonctionner dans de nombreux modes différents : le limbe (où il observe le bord de l'atmosphère de la planète), le nadir (où il pointe directement vers la planète) et l'occultation, comme SO. Ces modes sont illustrés à la figure 4. Le spectromètre LNO est spécialement adapté pour mesurer au nadir, et c'était donc l'un des principaux objectifs du récent travail d'étalonnage de NOMAD.
Les spectromètres SO et LNO ont été étalonnés, comprenant également des mesure de performance du détecteur et des composants optiques, afin de nous permettre de convertir les données entrantes en mesures scientifiques utilisables. Deux équipes, utilisant des approches différentes, ont étudié indépendamment l'étalonnage du canal LNO : elles sont d'accord entre elles à 3% près, ce qui nous donne une confiance supplémentaire dans l'exactitude de l'étalonnage.
Crédit: BIRA-IASB
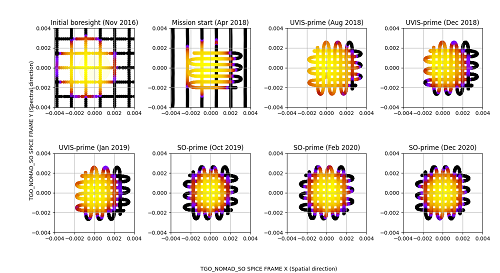
Comme tous les spectromètres sont orientés vers le Soleil, dont le diamètre, vu de Mars, n'est que d'environ 1/3 de degré (plus étroit que la largeur de votre petit doigt à bout de bras), la direction de pointage des canaux a dû être mesurée très précisément et est régulièrement vérifiée pour s'assurer qu'elle ne se déplace pas au fil du temps. Pour ce faire, le satellite effectue une manœuvre afin que tous les spectromètres voient le Soleil (qui donne un signal élevé sur le détecteur) et l'espace sombre autour du Soleil (qui ne donne aucun signal). Nous pouvons alors comparer la direction de pointage du vaisseau spatial aux mesures, et voir si le Soleil est observé exactement au moment et à l'endroit où nous nous attendons à ce qu'il soit : si ce n'est pas le cas, cela signifie que notre direction de pointage est légèrement erronée, et nous utilisons donc ces observations pour trouver le meilleur vecteur de pointage. Trois exemples sont présentés dans la figure 5.
Les données NOMAD mesurées jusqu’à aujourd’hui sont calibrées
De nouvelles données arrivent en permanence de Mars : une fois les mesures calibrées, les résultats sont partagés avec la communauté scientifique mondiale pour être analysés puis comparés aux mesures et aux efforts de modélisation précédents (par exemple,GEM Mars). Cela nous permet de récupérer des informations précieuses sur les processus physiques et chimiques qui se déroulent dans l'atmosphère martienne.
Publications
Une liste des publications est disponible sur le site web: nomad.aeronomie.be
Références
- Calibration of the NOMAD-UVIS data by Willame et al., https://orfeo.belnet.be/handle/internal/9995
- Calibration of NOMAD on ESA's ExoMars Trace Gas Orbiter: Part 1 – The Solar Occultation channel by Thomas et al., https://doi.org/10.1016/j.pss.2021.105411
- Calibration of NOMAD on ESA's ExoMars Trace Gas Orbiter: Part 2 – The Limb, Nadir and Occultation (LNO) channel by Thomas et al., https://orfeo.belnet.be/handle/internal/9994
- Calibration of NOMAD on ExoMars Trace Gas Orbiter: Part 3 - LNO validation and instrument stability by Cruz-Mermy et al., https://doi.org/10.1016/j.pss.2021.105399
- Removal of straylight from ExoMars NOMAD-UVIS observations by Mason et al., https://orfeo.belnet.be/handle/internal/9990
Crédit: BIRA-IASB
Credit: BIRA-IASB